| blob | 24443e0df382b315c453f4dda4848d1b31f6fe89 |
1 
3 # Hello and welcome to INAV 7 "Ferocious Falcon"
5 Please carefully read all of this document for the best possible experience and safety.
7 Contact other pilots, share experiences, suggestions and ask for help on:
9 <table>
10 <body>
11 <tr>
12 <td><img width="48" src="https://discord.com/assets/f9bb9c4af2b9c32a2c5ee0014661546d.png"></td>
13 <td><a href="https://discord.gg/peg2hhbYwN" target="_blank">INAV Discord Server</a></td>
14 </tr>
15 <tr>
16 <td><img src="https://upload.wikimedia.org/wikipedia/commons/c/cd/Facebook_logo_%28square%29.png" width="48"></td>
17 <td><a href="https://www.facebook.com/groups/INAVOfficial">INAV Official on Facebook</a></td>
18 </tr>
19 </tbody>
20 </table>
22 # Important Notes
24 > INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
26 > The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
28 > The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
30 > Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
32 # Upgrading from a previous release
34 ## Upgrading from INAV 6 and 6.1
36 1. Download and install the new [INAV Configurator 7](https://github.com/iNavFlight/inav-configurator/releases)
37 1. Save to a file the current _diff all_ from the CLI.
38 1. Upgrade to INAV 7 using the **Full Erase** option in the configurator.
39 1. In case of Analog FPV, upload your OSD font of choice from the OSD tab.
40 1. Go to the CLI again and paste the above-described contents from the file you previously created and write _save_ , press ENTER.
41 1. There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
42 1. You should be ready, explore new 7.0 features, and enjoy!
44 ## Upgrading from older versions
46 Please follow the instructions on [this](https://github.com/iNavFlight/inav/wiki/Upgrading-from-an-older-version-of-INAV-to-the-current-version) page.
48 # Major changes
50 ## Flexible motor and servo output allocation
52 INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
53 Specific function `AUTO`, `MOTORS` or `SERVOS` can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
54 Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
56 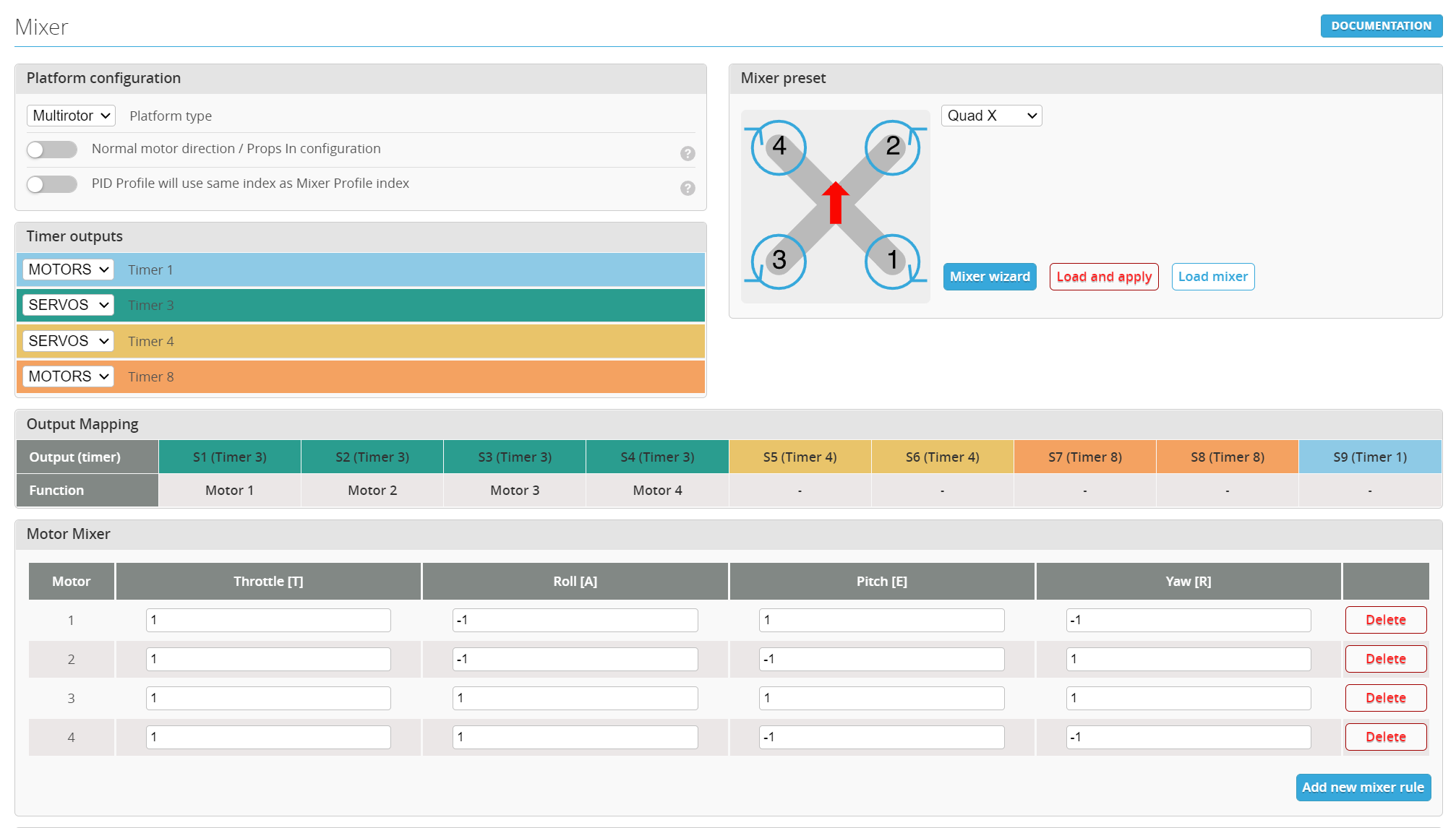
58 Bear in mind:
59 * In some rare cases, output assignment might be different than in INAV 6. **This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.**
60 * It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
62 ## Mixer profiles and VTOL support
64 This has been a frequent request since PNP VTOL models started becoming more common.
66 Read more in [Mixer Profile INAV docs](https://github.com/iNavFlight/inav/blob/master/docs/MixerProfile.md) and [VTOL INAV docs](https://github.com/iNavFlight/inav/blob/master/docs/VTOL.md)
68 ## Ez Tune
70 The **Ez Tune** is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
72 * Axis ratio
73 * Main filter frequency
74 * Response
75 * Damping
76 * Stability
77 * Aggressiveness
78 * Rate
79 * Expo
81 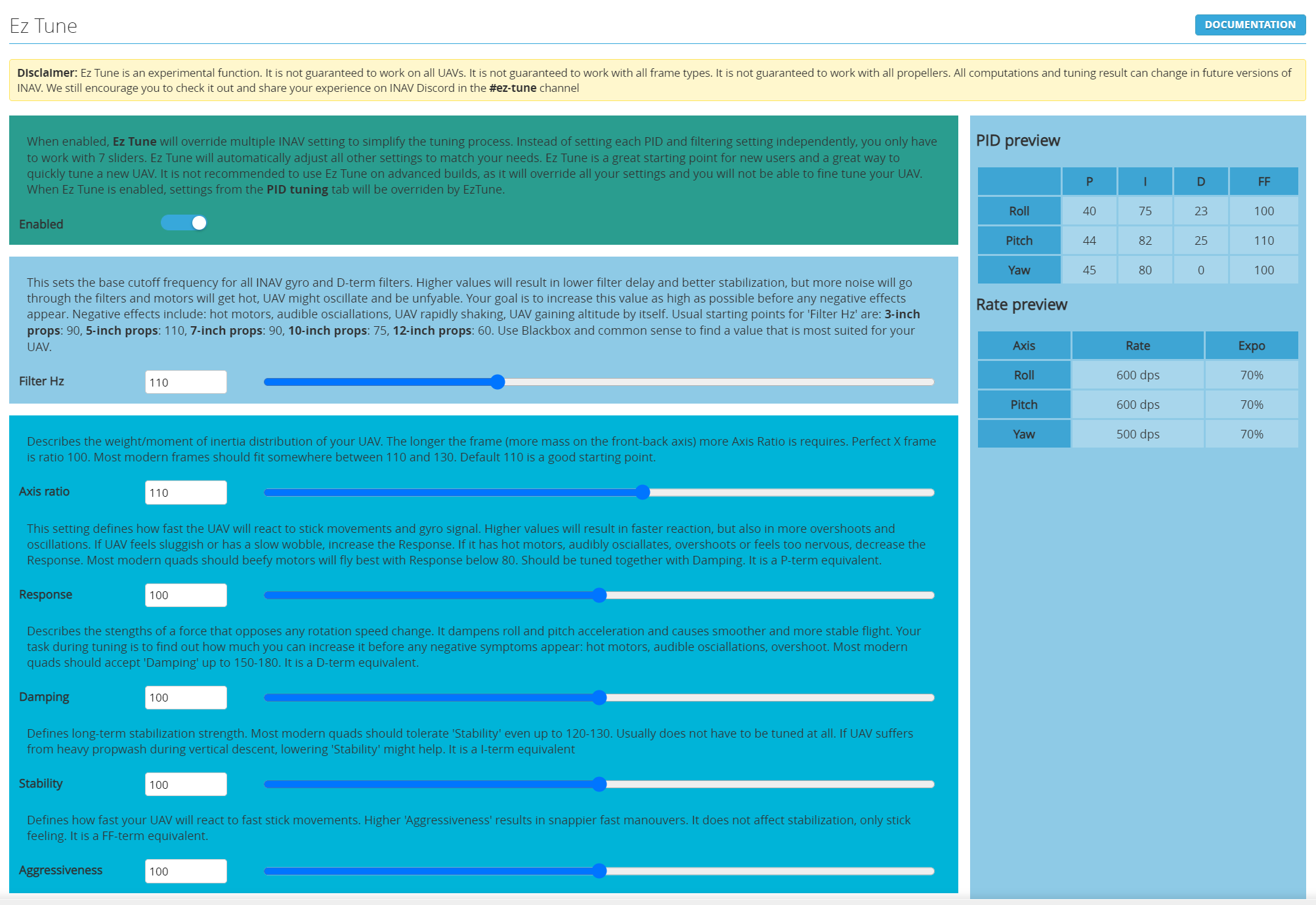
83 > Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
85 Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
87 More on the topic of **Ez Tune** can be found [here](https://youtu.be/94foP_mxBLk)
89 ## In-flight Emergency Rearm
91 With INAV 7.0 came the ability to **Emergency Rearm**. This allows you to rearm in flight when you accidentally disarm. You need to do this within 5 seconds of disarming. Which sounds short, but is actually a pretty long time. Emergency Rearm can be used after a launch and while the aircraft still believes it's flying. It bypasses safety checks (including the throttle position) and doesn't trigger auto launch. Multirotors will also briefly switch to Angle to stabilise and level the flight. You can read all about it at [https://github.com/iNavFlight/inav/pull/9254](https://github.com/iNavFlight/inav/pull/9254?fbclid=IwAR2MDYh2PSmDsxgc58qjcDcNLkOQyzvltO6J4vDPs5ISQsr4jFwQX2h2VzE)
93 ## Timer DMA Burst
95 INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
97 * Matek F405 TE
98 * SpeedyBee F405 V3
100 ## JETI EXBUS fixed
102 The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in https://github.com/betaflight/betaflight/pull/13130 . Thank you @SteveCEvans and @klutvott123
104 ## Multirotor Cruise Mode
106 The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
108 ## NMEA Protocol no longer available
110 As mentioned in the `Important Notes` section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either `UBLOX` or `UBLOX7` protocol.
112 ## GPS Improvements
114 A number of improvements have been made to GPS support in INAV 7.
116 It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
118 M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your `UBLOX7` GPS (`gps_ublox_nav_hz`). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
120 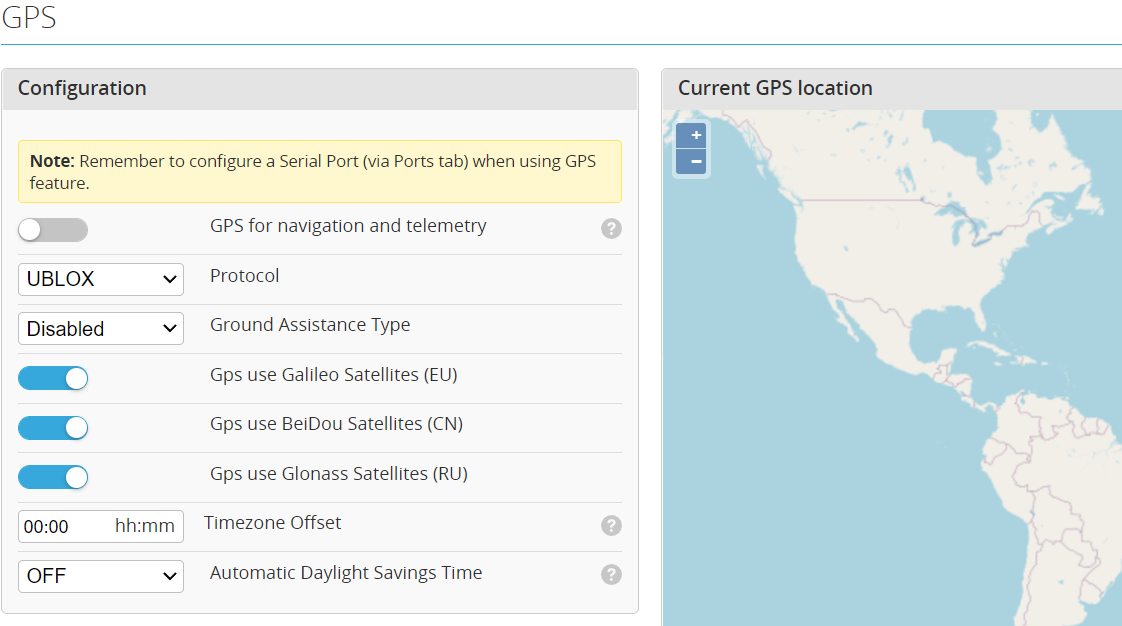
122 ## MSP VTX support
124 INAV now support MSP VTX when using MSP DisplayPort OSD.
126 Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
128 If you MSP DisplayPort OSD is working, no extra configuration is needed.
130 ## Linear Descent RTH mode changed
132 `AT_LEAST_LINEAR_DESCENT` is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using `AT_LEAST_LINEAR_DESCENT`, you should now just use `AT_LEAST` as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the `nav_rth_home_altitude`. In some cases, if flying below the home position, this will work as a linear ascent.
134 You can also decide when the linear descent will start. Set the `nav_rth_linear_descent_start_distance` parameter to the distance (metres) from the home point, where you want to start descending. Set to `0`, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
136 These options are available in Configurator.
138 See the [Navigation Mode: Return to Home wiki](https://github.com/iNavFlight/inav/wiki/Navigation-Mode:-Return-to-Home#linear-descent) for more details.
140 ## Pilot Logos
142 You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
144 More details are available in the [OSD Document](https://github.com/iNavFlight/inav/blob/master/docs/OSD.md#pilot-logos).
146 # Other changes
148 * The `AUTOLEVEL` mode is renamed to `AUTO LEVEL TRIM`. The functionality remains the same.
149 * The `osd_mah_used_precision` parameter has been renamed `osd_mah_precision`.
150 * 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
151 * Virtual pitot is enabled by default.
153 # Other removed functions
155 * FrSky D-series telemetry
156 * `output_mode` setting that allows to reassign all PWM outputs to either MOTORS or SERVOS
158 # New targets
160 * SDmodel H7V1
161 * Matek H743HD
162 * SpeedyBee F405 V4
163 * SpeedeBee F405 Mini
164 * SpeedyBee F7 Mini V2
165 * GEPRCF405
166 * GEPRCF722
167 * NEUTRONRC F435 Mini AIO
168 * DAKEFPV F405
169 * DAKEFPV F722
170 * AtomRC F405 NAVI Delux
172 # CLI
174 ## Changed settings
176 | Name | Description |
177 | ---- | ------ |
178 | gps_provider | Removed: `NMEA` |
179 | gps_sbas_mode | New: `SPAN` |
180 | nav_rth_alt_mode | Removed: `AT_LEAST_LINEAR_DESCENT` |
181 | pitot_hardware | New: `DLVR-L10D` |
183 ## New Items
185 | Name | Description |
186 | ---- | ------ |
187 | ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
188 | ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
189 | ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
190 | ez_enabled | Enables EzTune feature Default: FALSE |
191 | ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
192 | ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
193 | ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
194 | ez_response | EzTune response Values: 0 - 200 Default: 100 |
195 | ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
196 | gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10 supports up to 921600 and 230400 is the value used before INAV 7.0 Default: 230400 |
197 | gps_ublox_nav_hz | Navigation update rate for UBLOX7 receivers. Some receivers may limit the maximum number of satellites tracked when set to a higher rate or even stop sending navigation updates if the value is too high. Some M10 devices can do up to 25Hz. 10 is a safe value for M8 and newer. Values: 5 - 200 Default: 10 |
198 | gps_ublox_use_beidou | Enable use of Beidou satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps hardware support [OFF/ON]. Default: FALSE |
199 | gps_ublox_use_glonass | Enable use of Glonass satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps haardware support [OFF/ON]. Default: FALSE |
200 | led_pin_pwm_mode | PWM mode of LED pin. Values: `SHARED_LOW`, `SHARED_HIGH`, `LOW`, `HIGH`. Default: `SHARED_LOW` |
201 | mixer_automated_switch | If set to on, This mixer_profile will try to switch to another mixer_profile when 1.RTH heading home is requested and distance to home is lager than 3*nav_fw_loiter_radius on mixer_profile is a MULTIROTOR or TRICOPTER platform_type. 2. RTH landing is requested on this mixer_profile is a AIRPLANE platform_type Default: FALSE |
202 | mixer_pid_profile_linking | If enabled, pid profile_index will follow mixer_profile index. Set to OFF(default) if you want to handle PID profile by your self. Recommend to set to ON on all mixer_profiles to let the mixer_profile handle the PID profile switching on a VTOL or mixed platform type setup. Default: FALSE |
203 | mixer_switch_trans_timer | If switch another mixer_profile is scheduled by mixer_automated_switch or mixer_automated_switch. Activate Mixertransion motor/servo mixing for this many decisecond(0.1s) before the actual mixer_profile switch. Values: 0 - 200 Default: 0 |
204 | motorstop_on_low | If enabled, motor will stop when throttle is low on this mixer_profile Default: FALSE |
205 | nav_cruise_yaw_rate | Max YAW rate when NAV COURSE HOLD/CRUISE mode is enabled. Set to 0 to disable on fixed wing (Note: On multirotor setting to 0 will disable Course Hold/Cruise mode completely) [dps] Values: 0 - 120 Default: 20 |
206 | nav_landing_bump_detection | Allows immediate landing detection based on G bump at touchdown when set to ON. Requires a barometer and currently only works for multirotors. Default: FALSE |
207 | nav_mc_althold_throttle | If set to STICK the FC remembers the throttle stick position when enabling ALTHOLD and treats it as the neutral midpoint for holding altitude. If set to MID_STICK or HOVER the neutral midpoint is set to the mid stick position or the hover throttle position respectively. Default: STICK |
208 | nav_rth_linear_descent_start_distance | The distance [m] away from home to start the linear descent. 0 = immediately (original linear descent behaviour) Values: 0 - 10000 Default: 0 |
209 | nav_rth_use_linear_descent | If enabled, the aircraft will gradually descent to the nav_rth_home_altitude en route. The distance from home to start the descent can be set with `nav_rth_linear_descent_start_distance`. Default: FALSE |
210 | osd_arm_screen_display_time | Amount of time to display the arm screen [ms] Values: 1000 - 5000 Default: 1500 |
211 | osd_inav_to_pilot_logo_spacing | The space between the INAV and pilot logos, if `osd_use_pilot_logo` is `ON`. This number may be adjusted so that it fits the odd/even col width displays. For example, if using an odd column width display, such as Walksnail, and this is set to 4. 1 will be added so that the logos are equally spaced from the centre of the screen. Values: 0 - 20 Default: 8 |
212 | osd_joystick_down | PWM value for DOWN key Values: 0 - 100 Default: 0 |
213 | osd_joystick_enabled | Enable OSD Joystick emulation Default: FALSE |
214 | osd_joystick_enter | PWM value for ENTER key Values: 0 - 100 Default: 75 |
215 | osd_joystick_left | PWM value for LEFT key Values: 0 - 100 Default: 63 |
216 | osd_joystick_right | PWM value for RIGHT key Values: 0 - 100 Default: 28 |
217 | osd_joystick_up | PWM value for UP key Values: 0 - 100 Default: 48 |
218 | osd_mah_precision | Number of digits used for mAh precision. Currently used by mAh Used and Battery Remaining Capacity Values: 4 - 6 Default: 4 |
219 | osd_use_pilot_logo | Use custom pilot logo with/instead of the INAV logo. The pilot logo must be characters 473 to 511 Default: FALSE |
220 | pid_iterm_limit_percent | Limits max/min I-term value in stabilization PID controller. It solves the problem of servo saturation before take-off/throwing the airplane into the air. Or multirotors with low authority. By default, error accumulated in I-term can not exceed 33% of total pid throw (around 165us on deafult pidsum_limit of pitch/roll). Set 0 to disable completely. Values: 0 - 200 Default: 33 |
221 | tpa_on_yaw | Throttle PID attenuation also reduces influence on YAW for multi-rotor, Should be set to ON for tilting rotors. Default: FALSE |
223 ## Removed Items
225 | Name | Description |
226 | ---- | ------ |
227 | dterm_lpf2_hz | |
228 | dterm_lpf2_type | |
229 | frsky_coordinates_format | |
230 | frsky_default_latitude | |
231 | frsky_default_longitude | |
232 | frsky_unit | |
233 | frsky_vfas_precision | |
234 | fw_iterm_throw_limit | |
235 | moron_threshold | |
236 | nav_fw_cruise_yaw_rate | |
237 | nav_use_midthr_for_althold | |
238 | osd_mah_used_precision | |
239 | output_mode | |
241 # Changelist
243 The full list of changes is available [here](https://github.com/iNavFlight/inav/pulls?q=is%3Apr+milestone%3A7.0+is%3Aclosed)
244 The full list of INAV Configurator changes is available [here](https://github.com/iNavFlight/inav-configurator/pulls?q=is%3Apr+milestone%3A7.0+is%3Aclosed)
246 ## What's Changed from INAV 6.1.1
248 * INAV 7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8886
249 * Enable USE_SERVO_SBUS on all targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8876
250 * Release 6.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8763
251 * Drop D-term LPF2 as no longer used by @DzikuVx in https://github.com/iNavFlight/inav/pull/8875
252 * Drop FrDky D-series telemetry support by @DzikuVx in https://github.com/iNavFlight/inav/pull/8878
253 * Allow scheduler to go down to 10us period by @DzikuVx in https://github.com/iNavFlight/inav/pull/8877
254 * Drop moron_threshold setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/8859
255 * Release 6.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8912
256 * Add target BLACKPILL_F411 by @HKR1987 in https://github.com/iNavFlight/inav/pull/8902
257 * Update GCC to 10.3.1 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8917
258 * Release 6.1.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8887
259 * docs: fix documentation of gvar set by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8955
260 * Update Building in MSYS2 Doc by @pwnept in https://github.com/iNavFlight/inav/pull/8934
261 * Add osd menu option to preview font file by @mmosca in https://github.com/iNavFlight/inav/pull/8932
262 * Jh update usb flash doc by @stronnag in https://github.com/iNavFlight/inav/pull/8974
263 * Add the "GEPRCF722_BT_HD" target by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/8943
264 * Recognize MPU9255 as a valid IMU by @VasilKalchev in https://github.com/iNavFlight/inav/pull/8927
265 * Cleanup m25p16 flash detection code by @mmosca in https://github.com/iNavFlight/inav/pull/8985
266 * Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/8987
267 * Add IFLIGHT_BLITZ_F7_AIO target by @mmosca in https://github.com/iNavFlight/inav/pull/8977
268 * Mark IFLIGHT_BLITZ_F7_AIO as SKIP_RELEASES by @mmosca in https://github.com/iNavFlight/inav/pull/8988
269 * Have you ever wished INAV had a mute switch? by @mmosca in https://github.com/iNavFlight/inav/pull/8989
270 * Enhance Linear Descent RTH feature by @MrD-RC in https://github.com/iNavFlight/inav/pull/8810
271 * updated battery profile documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9002
272 * INAV capitalization by @ryet9 in https://github.com/iNavFlight/inav/pull/9001
273 * Rename AUTO LEVEL by @MrD-RC in https://github.com/iNavFlight/inav/pull/8972
274 * fixed pitot sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9019
275 * modify servo and motor and magnetometer for AocodaRC F4V2 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9040
276 * Release 6.1.0 mergeback by @DzikuVx in https://github.com/iNavFlight/inav/pull/8957
277 * Fix: SpeedyBee F405 V3 uSD card vs OSD interference by @shirase in https://github.com/iNavFlight/inav/pull/9028
278 * Update Navigation.md by @RomanLut in https://github.com/iNavFlight/inav/pull/9058
279 * Update Aocodarcf7mini by @dlt2018 in https://github.com/iNavFlight/inav/pull/9056
280 * Add MPU6000 and MPU6500 support to Foxeer F7 V4 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9070
281 * Cleanup abandoned EXTI code by @DzikuVx in https://github.com/iNavFlight/inav/pull/9071
282 * Multirotor WP speed fix when altitude enforce enabled by @breadoven in https://github.com/iNavFlight/inav/pull/9067
283 * Update target.h by @pgp69 in https://github.com/iNavFlight/inav/pull/9037
284 * updated controls documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9024
285 * remove obsolete static_assert by @stronnag in https://github.com/iNavFlight/inav/pull/9077
286 * [SITL OSX] Fix some of the warnings and add macosx SITL build to workflows by @mmosca in https://github.com/iNavFlight/inav/pull/9063
287 * Add QUADSPI Support for H7 and M25P16 Flash Driver by @mluessi in https://github.com/iNavFlight/inav/pull/8915
288 * Fix bug for DJI O3's altitude when using imperial by @MrD-RC in https://github.com/iNavFlight/inav/pull/9076
289 * Switch sensor infrastructure to be float internally by @DzikuVx in https://github.com/iNavFlight/inav/pull/9075
290 * [SITL] disable nagle for UART TCP by @stronnag in https://github.com/iNavFlight/inav/pull/9079
291 * [SITL OSX] Fix lldb debugging in OSX and improve OSX detection by @mmosca in https://github.com/iNavFlight/inav/pull/9082
292 * [SITL] consolidate IP helpers into target.c by @stronnag in https://github.com/iNavFlight/inav/pull/9080
293 * [SITL] add missing BSD header from IP consolidation by @stronnag in https://github.com/iNavFlight/inav/pull/9085
294 * [Docs] Readme updates by @stronnag in https://github.com/iNavFlight/inav/pull/9090
295 * Speedybee F405 WING fixes by @DzikuVx in https://github.com/iNavFlight/inav/pull/9094
296 * fix conflicting types by @stronnag in https://github.com/iNavFlight/inav/pull/9097
297 * allow HITL to run with HW baro failure by @RomanLut in https://github.com/iNavFlight/inav/pull/9021
298 * Set 10Hz update rate for M9 and M10 gps devices by default and allow higher refresh rates by @mmosca in https://github.com/iNavFlight/inav/pull/9103
299 * Add board Aocodarcf405aio by @dlt2018 in https://github.com/iNavFlight/inav/pull/9089
300 * Update Borad Aocodarch7dual by @dlt2018 in https://github.com/iNavFlight/inav/pull/9100
301 * DSP based gyro operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/9078
302 * Acc processing with DSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9116
303 * Remove brew update step for SITL mac build by @mmosca in https://github.com/iNavFlight/inav/pull/9127
304 * ICM42605 gyro parsing fix by @erstec in https://github.com/iNavFlight/inav/pull/9125
305 * Release 6.1.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9106
306 * Fix version check and apply GNSS configuration for M8+ gps by @mmosca in https://github.com/iNavFlight/inav/pull/9128
307 * Multirotor landing bump detection by @breadoven in https://github.com/iNavFlight/inav/pull/8744
308 * Add configuration of Beidou and Glonass to M8, M9 and M10 gps modules by @mmosca in https://github.com/iNavFlight/inav/pull/9124
309 * update gpsConfig_t PG version by @stronnag in https://github.com/iNavFlight/inav/pull/9131
310 * It looks like UBLOX ROM version 2.01 omits the = sign from PROTVER by @mmosca in https://github.com/iNavFlight/inav/pull/9132
311 * reenable LTO for MacOS firmware builds by @stronnag in https://github.com/iNavFlight/inav/pull/9136
312 * Flycolor F7 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9122
313 * updated buzzer documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9148
314 * fixed beeper -ON_USB for 1S setup, fixed beeper -SYSTEM_INIT by @RomanLut in https://github.com/iNavFlight/inav/pull/9147
315 * Enable possibility to simulate HW sensor failures in HITL by @RomanLut in https://github.com/iNavFlight/inav/pull/8858
316 * Kakute H7 Wing by @erstec in https://github.com/iNavFlight/inav/pull/9145
317 * Update target.h by @dlt2018 in https://github.com/iNavFlight/inav/pull/9151
318 * fix target's by @dlt2018 in https://github.com/iNavFlight/inav/pull/9149
319 * Improve OSD stats page avg efficiency value scaling by @rmaia3d in https://github.com/iNavFlight/inav/pull/9109
320 * Fix AOCODARCH7DUAL Buzzer continous beeping issue by @lida2003 in https://github.com/iNavFlight/inav/pull/9143
321 * [SITL] suppress spurious linker warning with gcc12+ by @stronnag in https://github.com/iNavFlight/inav/pull/9163
322 * How to test a pull request.md - two minor typos by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9170
323 * Add some documentation on how to test a PR by @mmosca in https://github.com/iNavFlight/inav/pull/9168
324 * fixed enter/exit camera osd stick positions docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9165
325 * Fix: Inav 7.0.0 last build not working on SPEEDYBEEF405V3 by @shirase in https://github.com/iNavFlight/inav/pull/9162
326 * Foxeer H743 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9171
327 * Add new OSD document by @MrD-RC in https://github.com/iNavFlight/inav/pull/9177
328 * Kakute H7 Wing Defaults altered by @erstec in https://github.com/iNavFlight/inav/pull/9185
329 * Add more baud rates to auto baud, as listed in m10 integration manual by @mmosca in https://github.com/iNavFlight/inav/pull/9174
330 * Use all 8 motor outputs on AXISFLYINGF7PRO by @nmaggioni in https://github.com/iNavFlight/inav/pull/9179
331 * MSP VTX support by @mmosca in https://github.com/iNavFlight/inav/pull/9166
332 * Repair led strip by @dlt2018 in https://github.com/iNavFlight/inav/pull/9190
333 * Get rid of some not needed floating point divisions by @DzikuVx in https://github.com/iNavFlight/inav/pull/9207
334 * Restore autobaud for m8 gps by @mmosca in https://github.com/iNavFlight/inav/pull/9219
335 * Update SPEEDYBEEF7V3. Fix Sensor VL53L1X by @druckgott in https://github.com/iNavFlight/inav/pull/9221
336 * Extend from 4 ADC channels to 6 (Matek H743 and others) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9180
337 * Nav altitude control improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8920
338 * fix neutronrcf435mini aio motor2 output bug by @shanggl in https://github.com/iNavFlight/inav/pull/9226
339 * Try to set vscode to play nice with formating style by @mmosca in https://github.com/iNavFlight/inav/pull/9223
340 * Fix for #9225, some OSD elements are skipped incorrectly, when GPS is not present. by @mmosca in https://github.com/iNavFlight/inav/pull/9229
341 * Block by Runtime calibration of ACC only when ACC is required by @DzikuVx in https://github.com/iNavFlight/inav/pull/9227
342 * Fix ADC on FOXEERH743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9230
343 * Update speedybeef405v3 docs, with some common issues by @mmosca in https://github.com/iNavFlight/inav/pull/9231
344 * Let M10 GPS disable SBAS and some small fixes changes by @mmosca in https://github.com/iNavFlight/inav/pull/9232
345 * Multicopter emergency landing improvement/fix by @breadoven in https://github.com/iNavFlight/inav/pull/9169
346 * Fix SITL memory leaks by @psmitty7373 in https://github.com/iNavFlight/inav/pull/9235
347 * Add constrain for DynLPF computation by @DzikuVx in https://github.com/iNavFlight/inav/pull/9242
348 * Multirotor Althold throttle hover option + altitude adjustment indication by @breadoven in https://github.com/iNavFlight/inav/pull/9220
349 * OSD Altitude field fix by @breadoven in https://github.com/iNavFlight/inav/pull/9261
350 * Add blackbox target heading + missing Nav auto enabled flight modes by @breadoven in https://github.com/iNavFlight/inav/pull/9249
351 * SKYSTARSH743HD remove non-existent S9 & S10. Add servos target by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9214
352 * [doc] update serial_printf document iaw current implementation by @stronnag in https://github.com/iNavFlight/inav/pull/9266
353 * Change motor/servo assignements for RUSH_BLADE_F7 targets by @mmosca in https://github.com/iNavFlight/inav/pull/9262
354 * Pitot DLVR-L10D sensor by @jmajew in https://github.com/iNavFlight/inav/pull/9216
355 * Add GEPRCF405 and GEPRCF722 targets by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9260
356 * Multi function OSD utility by @breadoven in https://github.com/iNavFlight/inav/pull/8698
357 * Timer DMA burst by @shirase in https://github.com/iNavFlight/inav/pull/9265
358 * Add mup6500 for mambaf405us by @jianwwpro in https://github.com/iNavFlight/inav/pull/8827
359 * Programming Frameword.md: Update to match Configurator renaming by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9275
360 * SpeedyBee F7 Mini V2 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9272
361 * Speedybee F405 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9273
362 * Multirotor course hold/cruise mode by @breadoven in https://github.com/iNavFlight/inav/pull/9213
363 * Bump navConfig PG that was forgotten in #9220 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9278
364 * Switch MatekF405TE to use burst DMA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9277
365 * Update Building in Windows 10 or 11 with Linux Subsystem.md by @wchnflr in https://github.com/iNavFlight/inav/pull/9279
366 * BETAFPVF435 unofficial target by @mmosca in https://github.com/iNavFlight/inav/pull/9281
367 * Make PWM allocation a bit smarter. by @mmosca in https://github.com/iNavFlight/inav/pull/9268
368 * [sitl] add --version, add git commit to version output by @stronnag in https://github.com/iNavFlight/inav/pull/9286
369 * docs/programming user21 typo by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9289
370 * Failsafe fixes by @breadoven in https://github.com/iNavFlight/inav/pull/9283
371 * Mixer throttle fixes/improvements + more OSD Throttle changes by @breadoven in https://github.com/iNavFlight/inav/pull/9274
372 * Ignore tasks.json and use tabs in C files by @MrD-RC in https://github.com/iNavFlight/inav/pull/9295
373 * Enable the virtual pitot by default by @MrD-RC in https://github.com/iNavFlight/inav/pull/9299
374 * Add DPS310 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9284
375 * Drop output_mode setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/9300
376 * Throttle related refactor/clean up by @breadoven in https://github.com/iNavFlight/inav/pull/9287
377 * docs/ipf: Fix typos and clarify wording by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9298
378 * Further simplify timer usage flags. by @mmosca in https://github.com/iNavFlight/inav/pull/9288
379 * Bulk update targets with new pwm output assignments by @mmosca in https://github.com/iNavFlight/inav/pull/9309
380 * Remove timer compatibility define, since all targets have been updated by @mmosca in https://github.com/iNavFlight/inav/pull/9318
381 * DSHOT delay fix by @shirase in https://github.com/iNavFlight/inav/pull/9321
382 * [docs] modernise Serial and RX documents by @stronnag in https://github.com/iNavFlight/inav/pull/9322
383 * Mixer profile to open the posibility for vtol/mixed platform by @shota3527 in https://github.com/iNavFlight/inav/pull/8555
384 * Add SouthPAN SBAS for all my friends in AU/NZ. by @mmosca in https://github.com/iNavFlight/inav/pull/9320
385 * Drop NMEA protocol by @DzikuVx in https://github.com/iNavFlight/inav/pull/9302
386 * SpeedyBee F405 V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9324
387 * SpeedyBEEF405WING Change S11 timer, since TIM1 is used by LED by @mmosca in https://github.com/iNavFlight/inav/pull/9325
388 * Remove info about F3 mcus from Temperature sensors documentation by @mmosca in https://github.com/iNavFlight/inav/pull/9337
389 * Add Rate Dynamics to MSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9336
390 * Update PR test instructions by @mmosca in https://github.com/iNavFlight/inav/pull/9338
391 * Flight remaining flight distance value by @MrD-RC in https://github.com/iNavFlight/inav/pull/9333
392 * Fix mixer config initialization sequence by @shota3527 in https://github.com/iNavFlight/inav/pull/9339
393 * Fix for Rate dynamics MSP layer by @DzikuVx in https://github.com/iNavFlight/inav/pull/9340
394 * Add myself to Authors by @mmosca in https://github.com/iNavFlight/inav/pull/9341
395 * Add odometer to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9335
396 * Update Controls.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9351
397 * IPF: Add yaw operand to go with pitch and roll by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9305
398 * Add MatekH743HD variant by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9244
399 * additional fixes for mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9363
400 * fixed HITL docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9353
401 * Add the Aocodarcf722aio file by @dlt2018 in https://github.com/iNavFlight/inav/pull/9314
402 * Lower default hover throttle to 30% by @mmosca in https://github.com/iNavFlight/inav/pull/9361
403 * Increase channels to 24 for Jeti by @MrD-RC in https://github.com/iNavFlight/inav/pull/9350
404 * Add pilot logo to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9332
405 * fixes servo output issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9366
406 * minor changes on ahrs by @shota3527 in https://github.com/iNavFlight/inav/pull/9360
407 * Timer N channel fix by @shirase in https://github.com/iNavFlight/inav/pull/9276
408 * Add ICM42605 driver for SKYSTARSF405HD by @DusKing1 in https://github.com/iNavFlight/inav/pull/9370
409 * Multirotor coursehold/cruise mode fix by @breadoven in https://github.com/iNavFlight/inav/pull/9380
410 * Ez Tune for Multirotors by @DzikuVx in https://github.com/iNavFlight/inav/pull/9354
411 * update docker build scripts by @RomanLut in https://github.com/iNavFlight/inav/pull/9346
412 * Add SYM_TOTAL and SYM_GFORCE to BFCOMPAT by @mmosca in https://github.com/iNavFlight/inav/pull/9385
413 * In flight emergency rearm by @breadoven in https://github.com/iNavFlight/inav/pull/9254
414 * Re-enable baro. max chip seems to cause issues by @mmosca in https://github.com/iNavFlight/inav/pull/9400
415 * Make it easier to include all baro drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9394
416 * Make it easier to include all compass drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9401
417 * BFCOMPAT - improve wind and airspeed fields and labels by @rmaia3d in https://github.com/iNavFlight/inav/pull/9388
418 * HITL/SITL: allow hitl/sitl to arm with uncalibrated accelerometer by @RomanLut in https://github.com/iNavFlight/inav/pull/9345
419 * fix mixer_profie configurator issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9364
420 * flight/pid.c: fix AngleOverride(yaw) to degrees by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9329
421 * HITL: simulate battery voltage with any sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9212
422 * HITL: hd osd support by @RomanLut in https://github.com/iNavFlight/inav/pull/9327
423 * Fixed #9399 can't find baro chip on PB6/PB7 I2C1 by @lida2003 in https://github.com/iNavFlight/inav/pull/9412
424 * Fix JETI EXBUS overflow by @DzikuVx in https://github.com/iNavFlight/inav/pull/9407
425 * Disable ASFR function on ICM426xx driver by @DzikuVx in https://github.com/iNavFlight/inav/pull/9409
426 * 16G scale range for bmi270 accelerometer by @shota3527 in https://github.com/iNavFlight/inav/pull/9410
427 * tpa on yaw and i-term limit by @shota3527 in https://github.com/iNavFlight/inav/pull/9408
428 * FW Auto level trim bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9393
429 * Enhance mAh remaining OSD element by @MrD-RC in https://github.com/iNavFlight/inav/pull/9334
430 * Allow f722 to use mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9416
431 * Correct disarm servo throttle by @DzikuVx in https://github.com/iNavFlight/inav/pull/9413
432 * SAFETY issue -- servos.c: Correct servo throttle *off* when disarmed (not full throttle at disarm) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9330
433 * OSD Joystick by @RomanLut in https://github.com/iNavFlight/inav/pull/9201
434 * New target: ATOMRC Exceed F405 FC V2 by @NickB1 in https://github.com/iNavFlight/inav/pull/8956
435 * Add more power options for 1G3 group by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9243
436 * New target: SDMODELH7V1 by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9114
437 * Framework.md - Note about common error by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9422
438 * Update OSD.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9425
439 * comment on how to clone specific INAV releases added by @Daniel-1276 in https://github.com/iNavFlight/inav/pull/9414
440 * update vtol documents by @shota3527 in https://github.com/iNavFlight/inav/pull/9426
441 * Put getConfigMixerProfile as the last byte in message by @DzikuVx in https://github.com/iNavFlight/inav/pull/9431
443 ## New Contributors
444 * @HKR1987 made their first contribution in https://github.com/iNavFlight/inav/pull/8902
445 * @VasilKalchev made their first contribution in https://github.com/iNavFlight/inav/pull/8927
446 * @ryet9 made their first contribution in https://github.com/iNavFlight/inav/pull/9001
447 * @shirase made their first contribution in https://github.com/iNavFlight/inav/pull/9028
448 * @pgp69 made their first contribution in https://github.com/iNavFlight/inav/pull/9037
449 * @lida2003 made their first contribution in https://github.com/iNavFlight/inav/pull/9143
450 * @druckgott made their first contribution in https://github.com/iNavFlight/inav/pull/9221
451 * @psmitty7373 made their first contribution in https://github.com/iNavFlight/inav/pull/9235
452 * @jianwwpro made their first contribution in https://github.com/iNavFlight/inav/pull/8827
453 * @wchnflr made their first contribution in https://github.com/iNavFlight/inav/pull/9279
454 * @NickB1 made their first contribution in https://github.com/iNavFlight/inav/pull/8956
455 * @Daniel-1276 made their first contribution in https://github.com/iNavFlight/inav/pull/9414
457 **Full Changelog**: https://github.com/iNavFlight/inav/compare/6.1.1...7.0.0-RC1