| blob | 869430cafc0fac3b706f09f22e1ebdcbcccb5bb0 |
1 # HOWTO setup iNAV for fixed wing
3 ## Index
4 1. Features
6 2. What is needed
8 3. Flashing iNAV firmware to CC3D.
10 4. Basic settings
12 Flight controller orientation.
14 Port settings
16 Configuration
18 Failsafe
20 Transmitter setup
22 Motors
24 Servo setup
26 Recommended power layout
28 OSD setup
32 ## 1. Features
33 - Stabilization (Angle, Horizon modes)
34 - RTH (baro and mag are not needed for fixed wing)
35 - Waypoint missions (with EZGUI android apk).
36 - Battery monitoring
37 - RSSI monitoring
38 - Failsafe
39 - Telemetry
40 - etc
42 ## 2. What is needed
43 - Flight controller (one from the list, this guide shows how to setup CC3D)
44 - OSD (minimOSD or any other that supports Cleanflight)
45 - RX with telemetry support (just in case you want also telemetry). And a telemetry capable ground system.
46 - GPS receiver (any that supports at least 5Hz update)
47 - FPV hardware, airframe, RC
49 ## 3. Flashing iNAV firmware to CC3D.
50 First you need to download a precompiled firmware for the board [here](https://github.com/iNavFlight/inav/releases). Select one of the releases precompiled for CC3D:
51 - _inav_x.x.x_CC3D.hex_ for PWM receiver
52 - _inav_x.x.x_CC3D_PPM1.hex_ for PPM receiver
54 Next, you can check [numerous guides](https://www.youtube.com/watch?v=eClp-YBeSms&t=0s) how to flash CC3D with third party firmware (Attention, you'll need a FTDI adapter for the purpose). Of course you need to specify the previously downloaded firmware for the flashing. For now, if you have servos, it is not advisable to flash with them attached, because there is high frequency sent with default configuration, and you can burn them (the way -for now- is flash, configure plane and then attach servos).
56 ## 4. Basic settings
58 ### Port settings
59 It is done using Ports tab 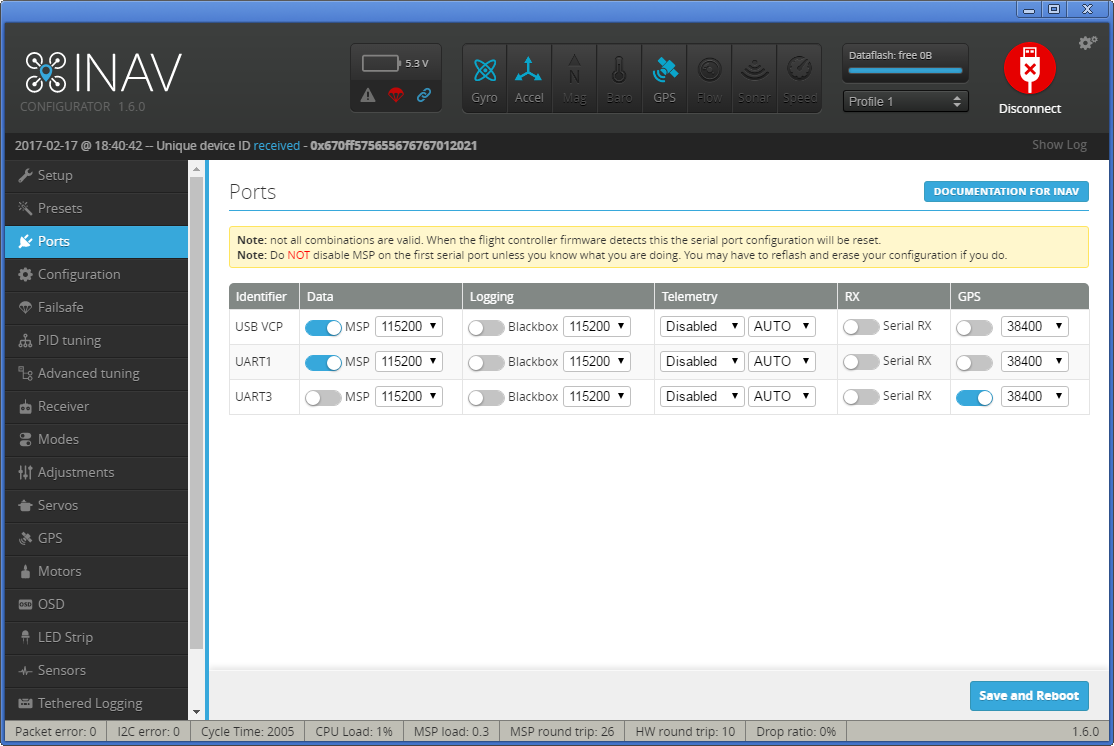.
61 - UART1 - leave default value. You'll connect here either OSD or FTDI to setup the FC. If you want telemetry select it in Inav configurator, so you can have telemetry when the aircraft is armed. In this case, your OSD should be capable to read LTM, in order to mantain working OSD and telemetry at the same time. You have to connect the TX line from CC3D to both OSD and RX telemetry capable receiver (as openlrsng systems). MWOSD can read both MSP and LTM telemetry.
62 - UART3 - for GPS. Switch on the option and select the correct port speed (38400 or 57600). Please pay attention that when using a ublox GPS receiver family 6-8 you don't need to make any configurations in the u-center. The flight controller under iNAV will do everything what is needed.
64 ### Configuration
65 On the Configuration tab in the Mixer group select the Airplane or Flying Wing depending on the airframe you are using.
66 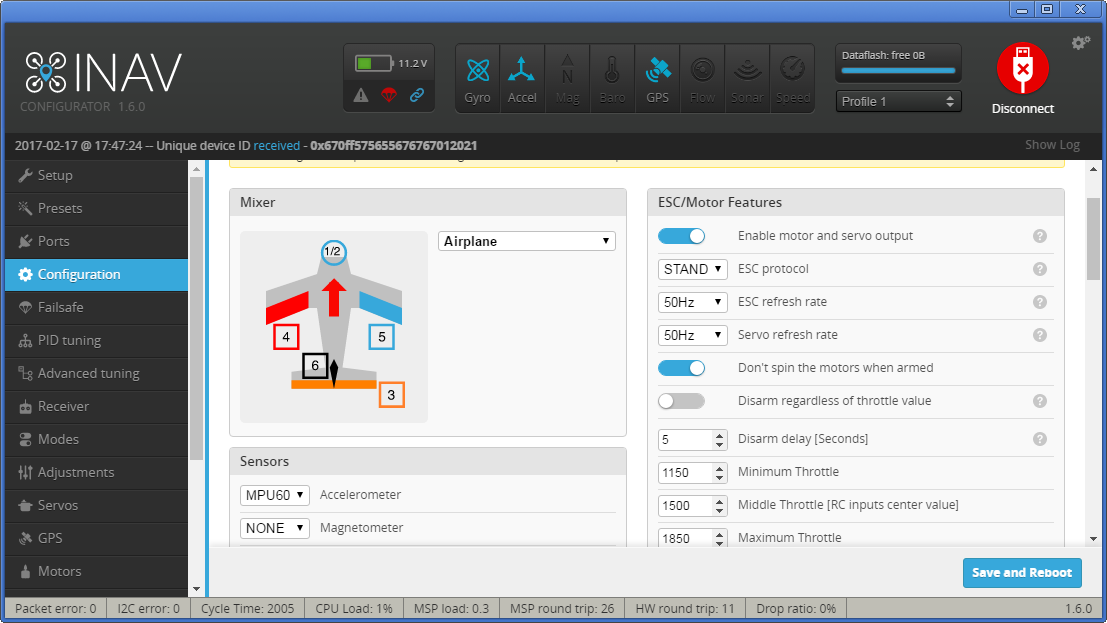
67 Do not pay attention on the servo numbering! It will be described later.
68 Now you need to make the accelerometer calibration. It is mandatory to fulfill it and it is better to do it before installing the FC into airframe. Please follow the [instructions](https://github.com/iNavFlight/inav/wiki/Sensor-calibration) to perform the 6 point accelerometer calibration.
70 ### Flight controller orientation.
71 After the calibration is done you may select the sutable board orientation
72 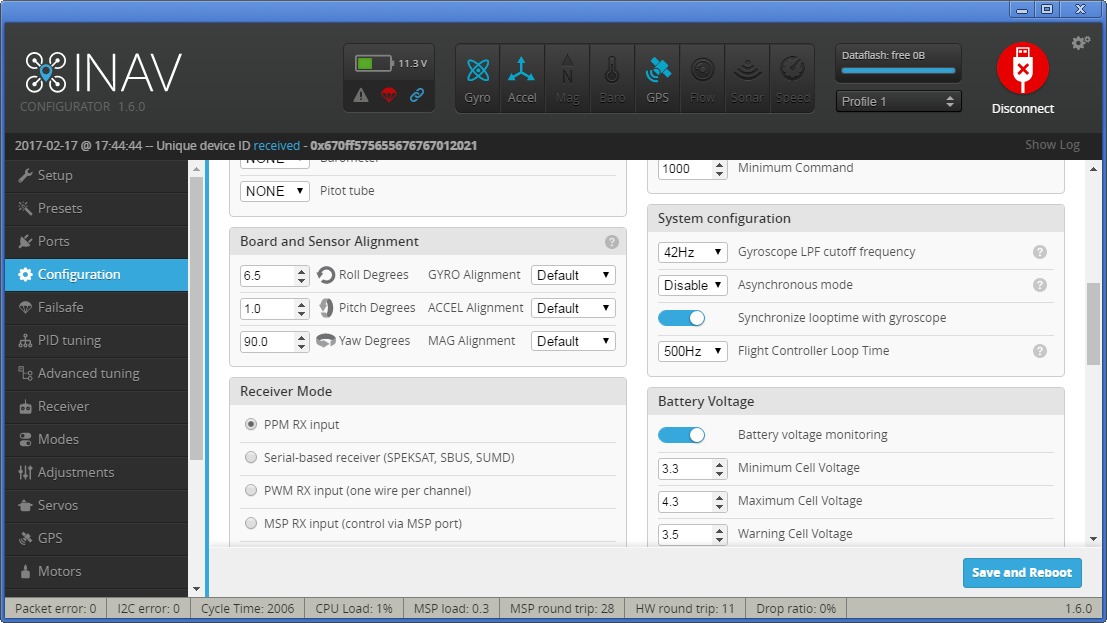
73 If you need to install your FC board into airplane such a way that the forward arrow points to some other direction, you need to change the FC orientation. This can be done or in the iNAV GUI or from CLI. I prefer doing it from GUI. Follow the Configuration tab and Board and sensor Alignment. If you want to mount the CC3D flight controller with USB plug to the left you need to set the Yaw Degrees parameter to 90. If you are going to mount the FC with USB plug facing right, then the Yaw Degrees = 270, etc.
75 Now you are ready to connect your hardware according to the schemes:
77 Parallel PWM Receiver ([click here](http://s8.hostingkartinok.com/uploads/images/2016/02/a47fb019c7783371053239a3d23a8d46.jpg) to see the real hardware photo)
79 <img src="http://s8.hostingkartinok.com/uploads/images/2016/02/4e641362191528c42758d626757b747a.png" width="400" height="300" />
81 PPM Receiver
83 <img src="http://s8.hostingkartinok.com/uploads/images/2016/02/c98cfcf64df8a8a7645429dc7ac4c0ea.png" width="400" height="300" />
85 Of course, according to the receiver used you need to use the aproppriate firmware for CC3D - inav_1.6.0_CC3D.hex for parallel PWM or inav_1.6.0_CC3D_PPM1.hex PPM receiver. For more information about CC3D pinout check the [CC3D](https://github.com/iNavFlight/inav/blob/master/docs/Board%20-%20CC3D.md) page
87 I usually don't like the motor rotation on arm, so I switch on the "Don't spin motors when armed" feature.
89 The new INAV firmware has all PWM outputs disable until you switch on the "Enable motor and servo output"
91 Switch on the GPS feature, and select the protocol.
92 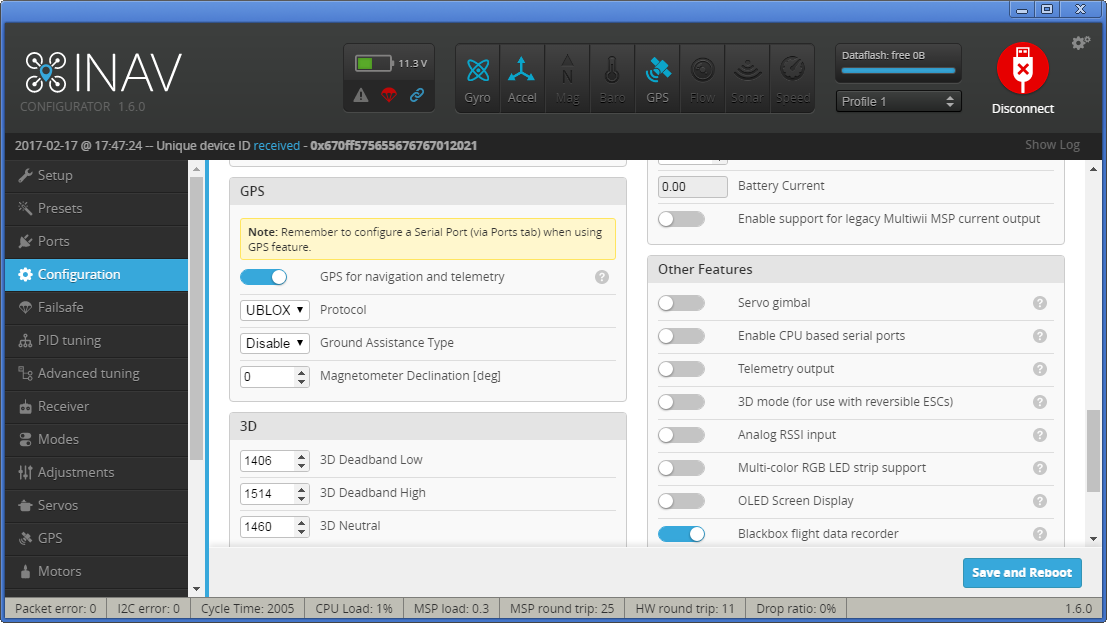
94 If your GPS receiver have enough satellites visible you'll be able to check the 3D fix in GPS tab
95 ![3D fix] (http://s8.hostingkartinok.com/uploads/images/2017/02/2db676b5f03d436480919b1cbc945fb5.png)
97 By default INAV won't arm without GPS fix if the GPS feature is ON. To disable it use CLI: "set nav_extra_arming_safety = OFF". And it is highly recomended to switch it back ON before real flights.
99 If your receiver connection is other than Parallel PWM Receiver, then you'll be able to setup battery voltage, current, RSSI monitoring. It is very userful. So IMHO a PPM is a must for CC3D FC.
101 On the Receiver tab set up the channel order and their correspondence to TX sticks movements.
103 On the Modes tab set up the flight modes according to the position of the AUX channels. For example, if you have a 3pos switch for the AUX1 you can get at minimum the following:
105 * minimum channel value - do not select any mode - only gyros will work. The hand launch take off in this mode is excellent.
106 * middle value - Angle or Horizon.
107 * maximum value - RTH. Automatic return home.
109 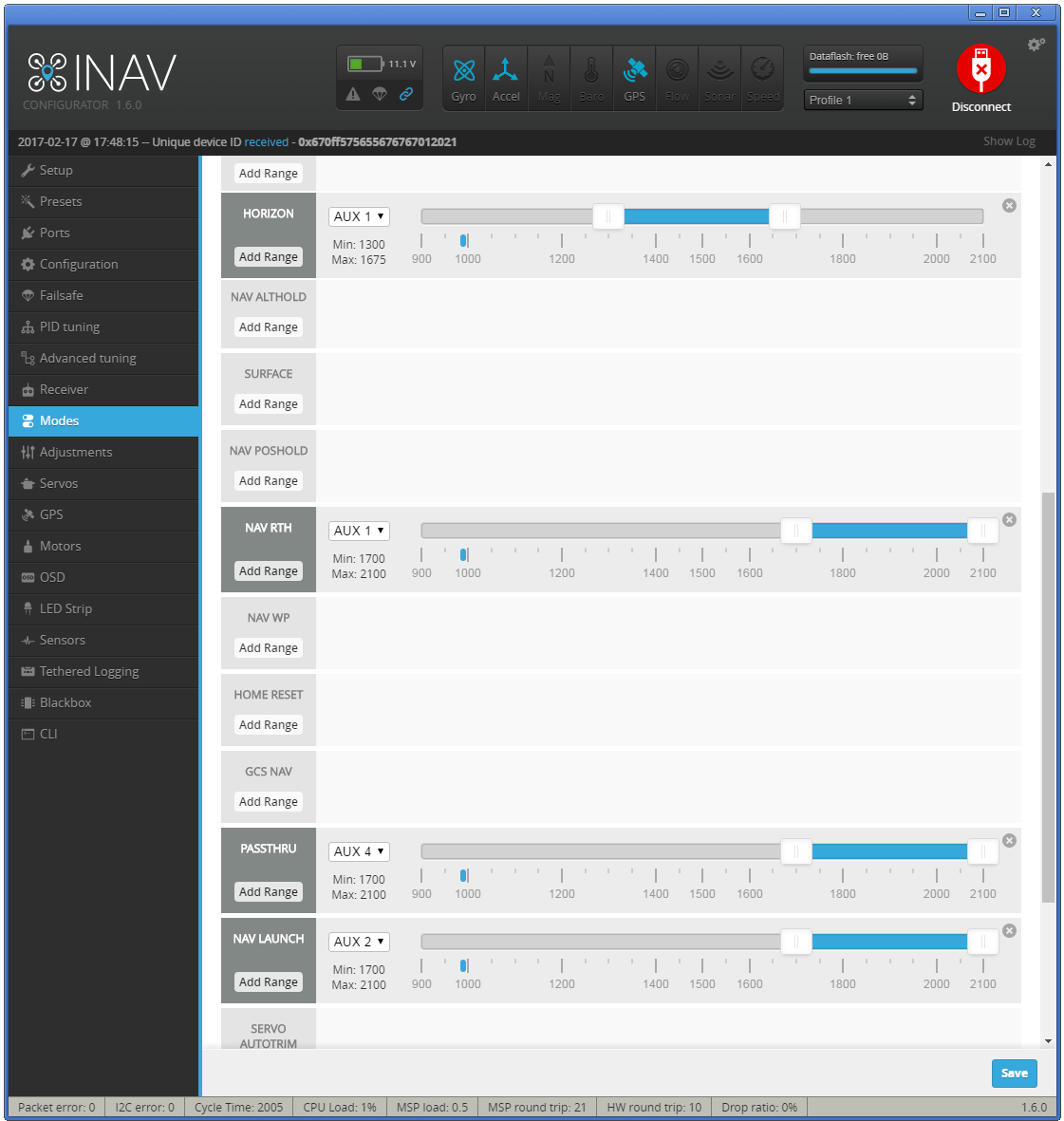
111 ### Failsafe
113 Check [this link](https://github.com/iNavFlight/inav/wiki/Failsafe) for RTH failsafe
115 Starting from iNav 1.6 the Filesafe feature is very transparent and clear. For the failsafe to work you'll need:
116 * Setup the receiver output no signal when your TX is off
117 * OR assign the Failsafe mode to one of the channels and force it to trigger when your TX is off
119 Set the desired Failsafe behavior. I prefer RTH.
120 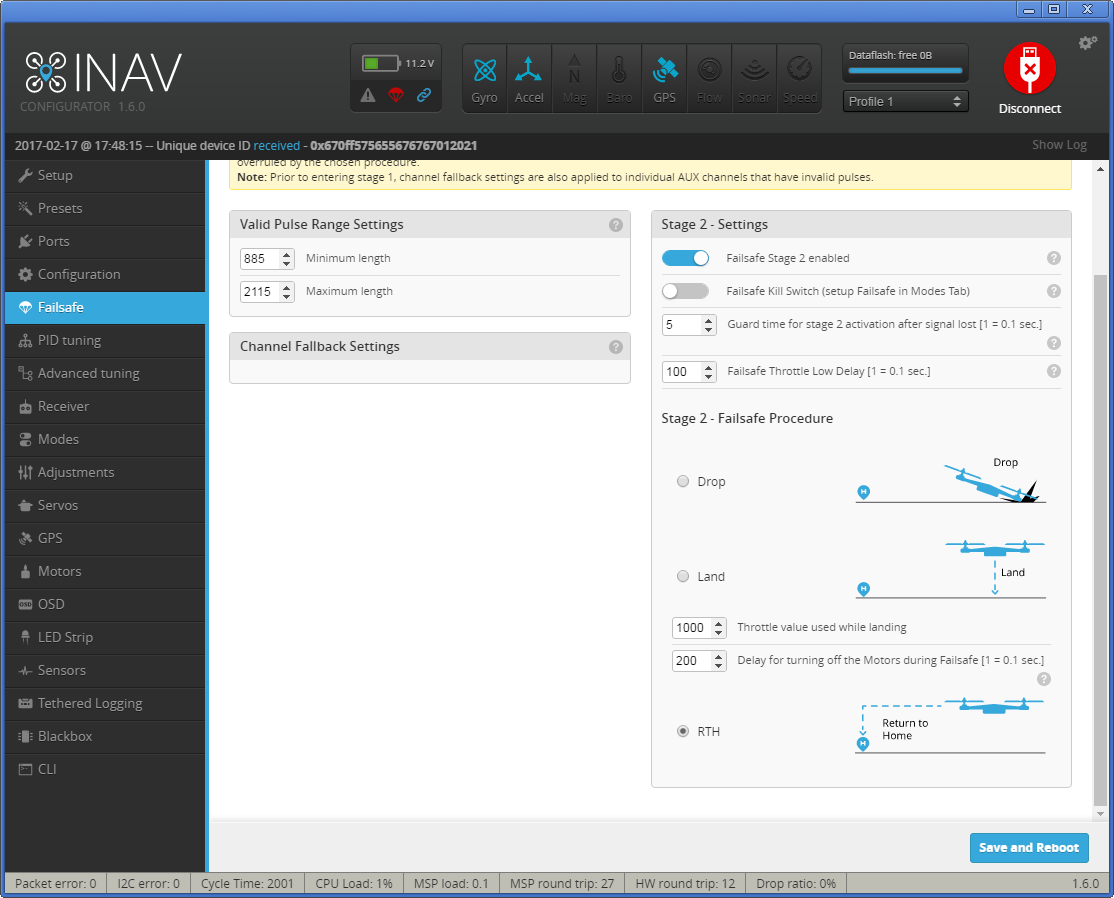
122 ###Telemetry
124 Connect your TX line and configure FC as explained above. Nowadays you can use several telemetry systems as [mwptools](https://github.com/stronnag/mwptools), [EZGUI](http://ez-gui.com/), [LTM Telemetry OLED](https://github.com/sppnk/LTM-Telemetry-OLED) and possibly others. The USART port can be shared with a OSD or used only for one of both features. For example, you can fly FPV w/o telemetry (just in your googles) or fly thermal soaring 3rd view w/o OSD. Or have both. Amazing you can do this with a simple cc3d, isnt it?.
126 ###Transmitter setup
128 You should adjust (normal or reverse) on your transmitter so sticks correspond to below:
130 In reciever tab:
131 * Throttle stick push away - increased value
132 * Yaw (Rudder) stick right - increased value
133 * Pitch (Elevator) stick push away - increased value
134 * Roll (Ailerons) stick right - increased value
136 Also use subtrim to get center value of 1500us and use travel adjustment to get at lowest value 1000us and highest 2000us when moving sticks.
137 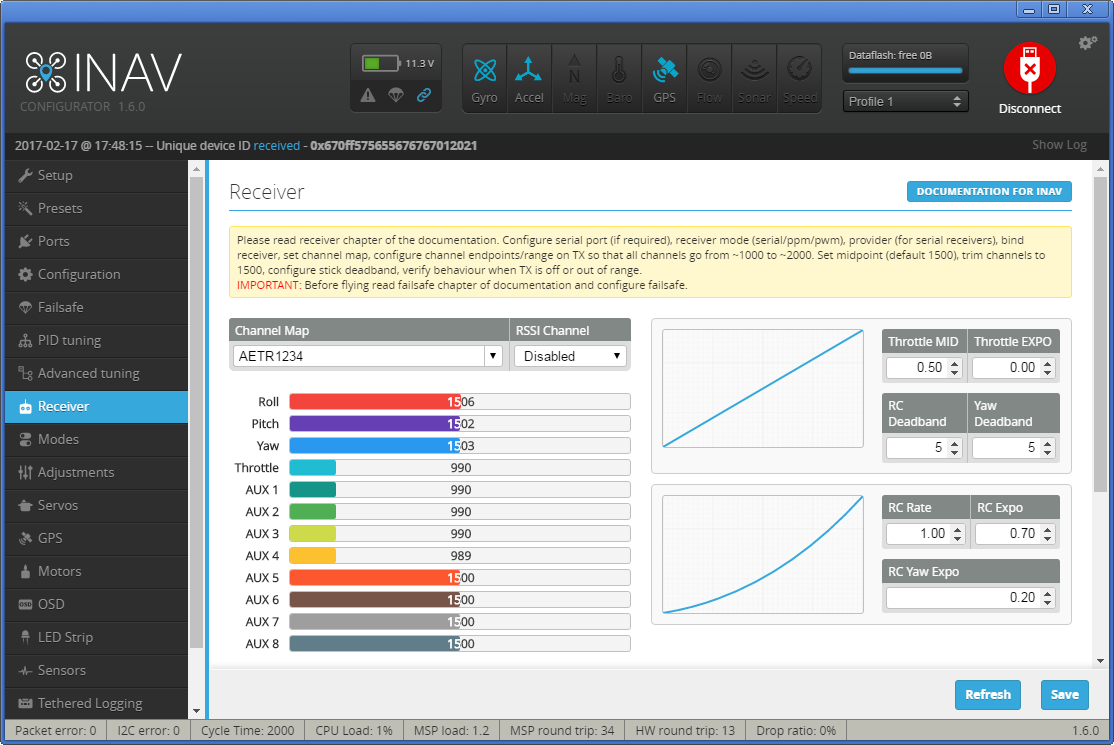
139 ### Motors
141 After this follow to the Motors tab, rock your plane and notice what levels are moving depending on PITCH, ROLL and YAW angles. You can remember it or write it down. ROLL - 4,5; PITCH - 3, YAW - 6.
143 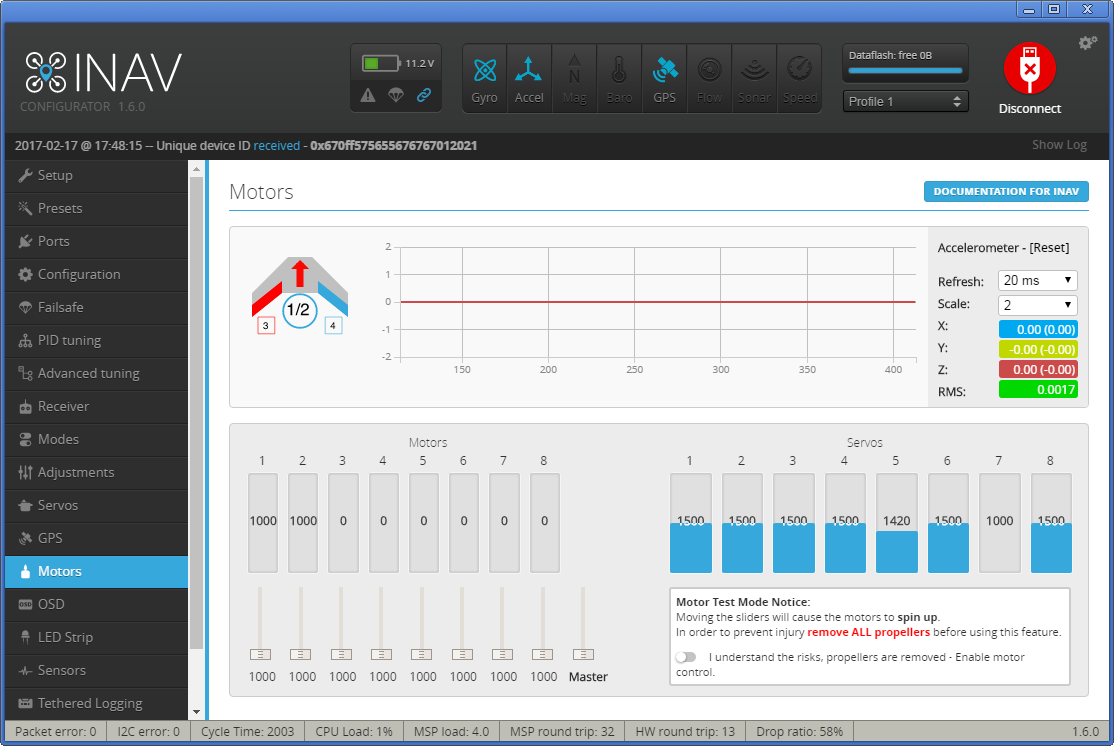
145 Turn on your transmitter, switch to the Angle or Horizon flight mode and follow the Servos tab.
147 ### Servo setup
149 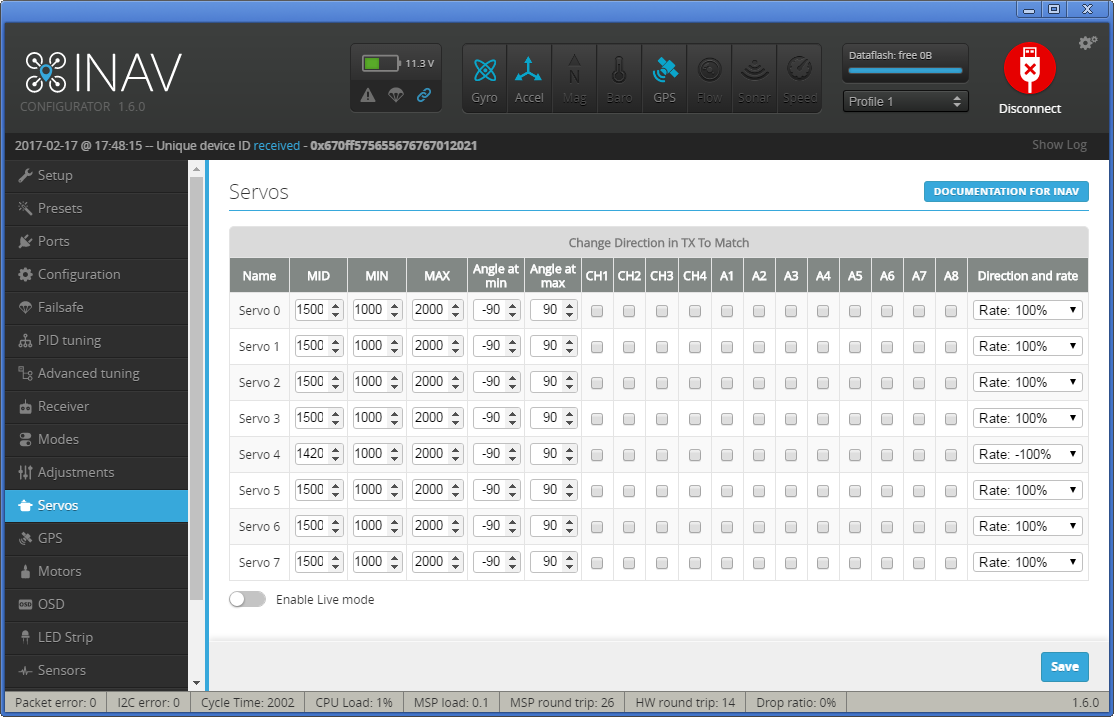
151 Here you need to be very attentive. In this tab you set up endpoints, neutral, rates and reverse for stabilization modes. Servo numbering in the tab starts from 0!
153 For the Elevator, tilt the plane's tail down, and the Elevator should go down. If the elevator goes up, then you need to set the Rate (the right-most drop down list) Servo 2 with negative sign.
155 Tilt the left wing down. Left Aileron should go down and right one should go up. If it is not so, then put negative Rate values for Servo 3 and Servo 4 (if your ailerons are connected by means of Y-cable, than you can change the settings for only one Servo or connect the Y-cable to other Servo out).
157 Turn the tail to the left, and the Rudder should go to the left. Otherwise switch the Servo 5 Rate to negative.
159 After this stick movement should also move servos the correct way. (General rules: Elevator stick down - elevator goes up, Aileron stick to the left - left aileron is up, right aileron is down, Rudder stick to the left, rudder goes to the left)
161 Attention! all the endpoints, neutrals, trimmers should be done on this tab, not in transmitter!
163 ### Recommended power layout
165 To prevent brownout its wise to power servos with one BEC and the flight controller + other equipment with another BEC.
167 This is one way to accomplish it:
169 Glued a new row of pins onto the case of the flightcontroller, the must be connected together. (See the bottom of pins)
171 All servos and ESC is connected to flightcontroller, except positive wire which goes to the new row. (This line gets its power from the BEC in the ESC)
173 Another external BEC is connected at random positive and negativ pin on flight controller to power it, the receiver and GPS.
175 This way if one servo get stuck and draws alot of amps you shouldnt risk your flight system to power down.
177 
178 
180 ### PID/PIFF Settings
181 The default PID settings that are set using Presets tab are a good starting point but usually you may need to chnge them if you want yor plane to fly really stable.
182 Here are my PIFF settings for a small 800mm flying wing - EPP Rainbow.
183 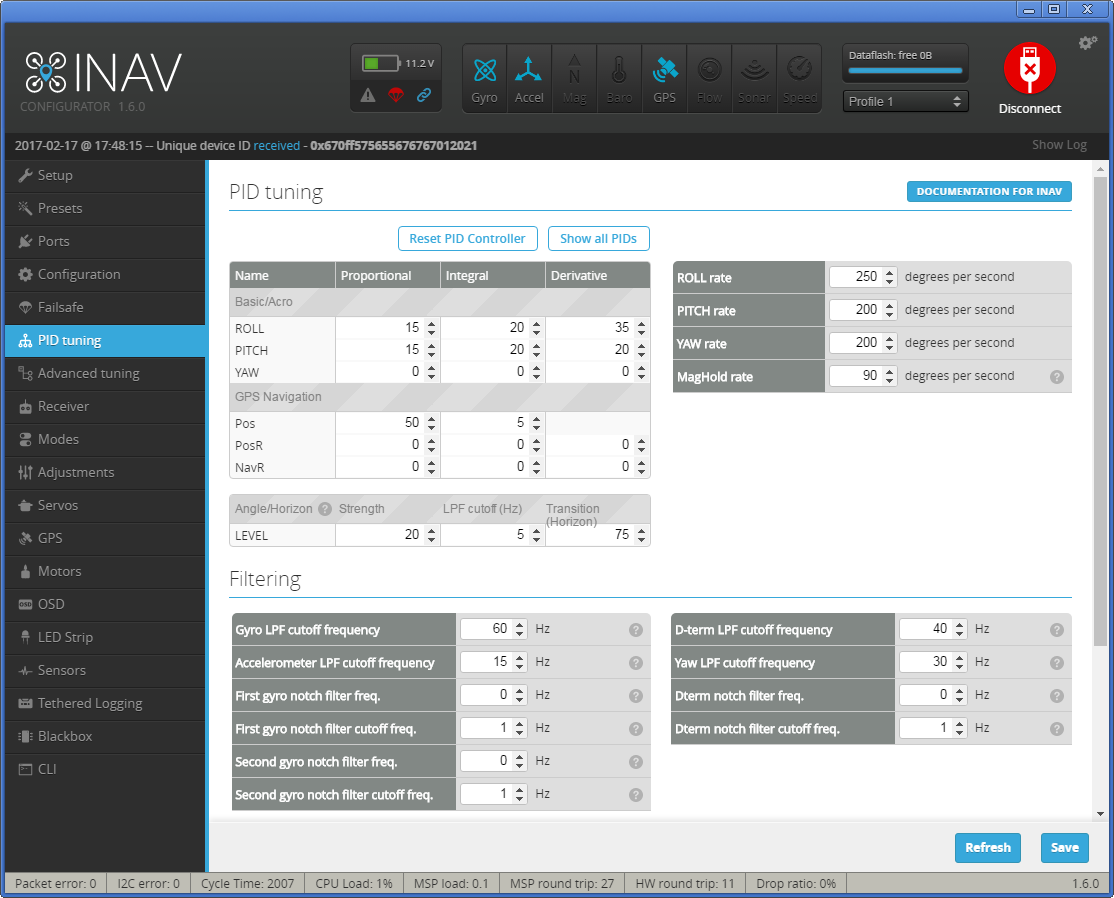
185 DigitalEntity wrote about the PIFF controller setup procedure the following, I have nothing to add:
187 If you have inflight adjustments - this will be easier for you. I tuned like this:
189 0) Fly ANGLE mode, LOS, calm day. Started with these PIFFs: P=5, I=10, D/FF = 20
191 1) Give hard roll command, watch how plane executes it. It should be smooth from start to finish, without (or with minimal) oscillation at the end of the roll, without much wobble. If it oscillates at the end of maneuver - reduce FF; if it starts fast, then slows down and after a moment pushes it further - that's indication of too low FF
193 2) Repeat for pitch
195 3) I dialed up FF as much as possible until I started to get oscillations at the end of maneuver and backed about 20%
197 4) If it doesn't reach commanded angle - increase I-gain (best verifiable with OSD indication for roll/pitch angles
199 5) Wait for some wind (to get some turbulence)
201 6) Dial up P to fight turbulence better. In ANGLE mode I+FF will keep aircraft nice and level, but P will improve turbulence handling. WARNING - increasing P will cause much more active servos and reduce their life expectancy.
203 ### OSD setup
204 I prefer using MW-OSD. It supports many protocols and also has native support of iNAV. Say you have a minimOSD or micro minimOSD. So first you need to upload [MWOSD](http://www.mwosd.com/) firmware to your minimOSD. You can find pretty straight forward install guide following the [link](https://github.com/ShikOfTheRa/scarab-osd/blob/master/OTHER/DOCUMENTATION/FirmwareFlashing.md). As usual you use Arduino IDE for global OSD config. All changes are done in the Config.h file. In our case we need to leave uncommented the following lines:
206 OSD HARDWARE settings:
208 `#define MINIMOSD`
210 CONTROLLER SOFTWARE
212 `#define iNAV`
214 AIRCRAFT/INSTALLATION TYPE settings
216 `#define FIXEDWING`
218 Usualy it is enough.
220 You may enable also rather helpful '#define MAPMODE' under FEATURES that allows you to see the map indication of relative positions of home and aircraft.
222 Configure config.h allowing LTM if you want to share USART1 with your telemetry system, as explained above.
224 All other settings are done in MWOSD configurator. Everything you need is to select the font you like, OSD indicators' positions. As iNAV takes care of voltage/current/rssi monitoring you'll need to ask the MWOSD to take these values from the FC (see the fig)
226 The screenshot of the MWOSD configuration is shown below:
227 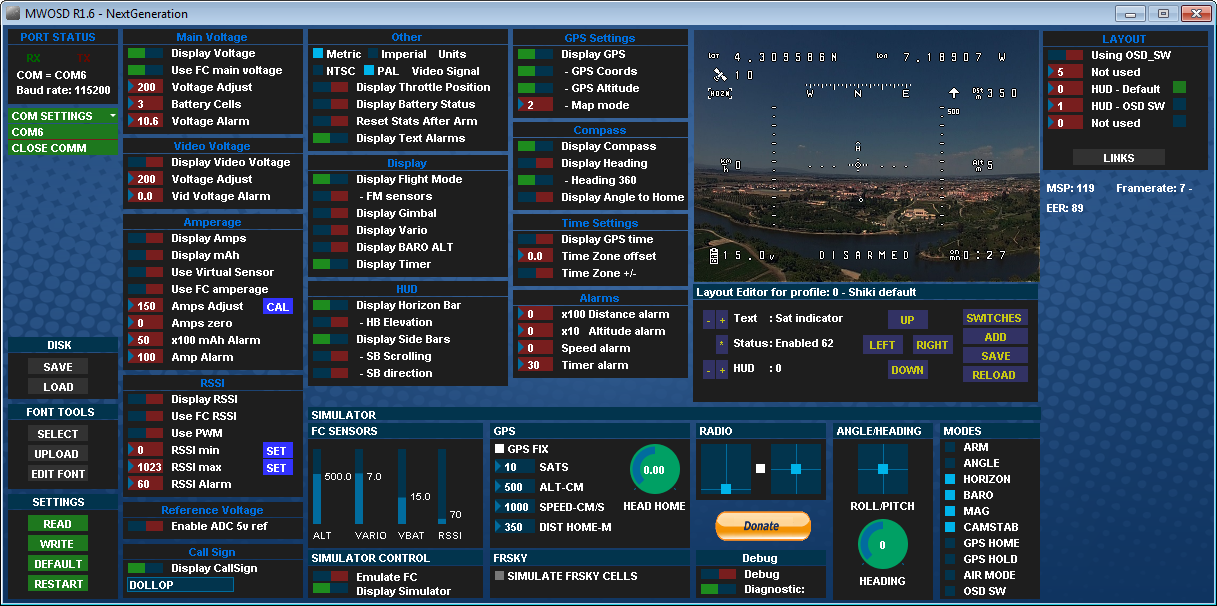
229 Watch this demo video of the iNAV flight and RTH function:
231 [](https://www.youtube.com/watch?v=GYd7mxGxNL8)
233 Good luck!